
RobotOTFWeldingStudio软件+RLU控制器+焊接振镜
系统概括


系统架构
金橙子飞行焊接系统由控制器RLU控制器、软件系统RobotOTFWeldingStudio、焊接振镜、激光器及机器人构成,金橙子主要提供控制单元,软件系统及振镜。软件系统可以集成二维视觉、三维视觉等传感系统,实现柔性生产。

系统参数
|
控制柜尺寸 |
800*660*880mm |
输入电压 |
220V |
||
|
防护等级 |
IP54 |
支持振镜协议 |
XY2-100/SL2-100 |
||
|
支持机器人 |
ABB/KUKA |
支持总线 |
TCP IP/PROF INET/MODBUS/ETP等 |
||
系统特点
自研底层控制系统
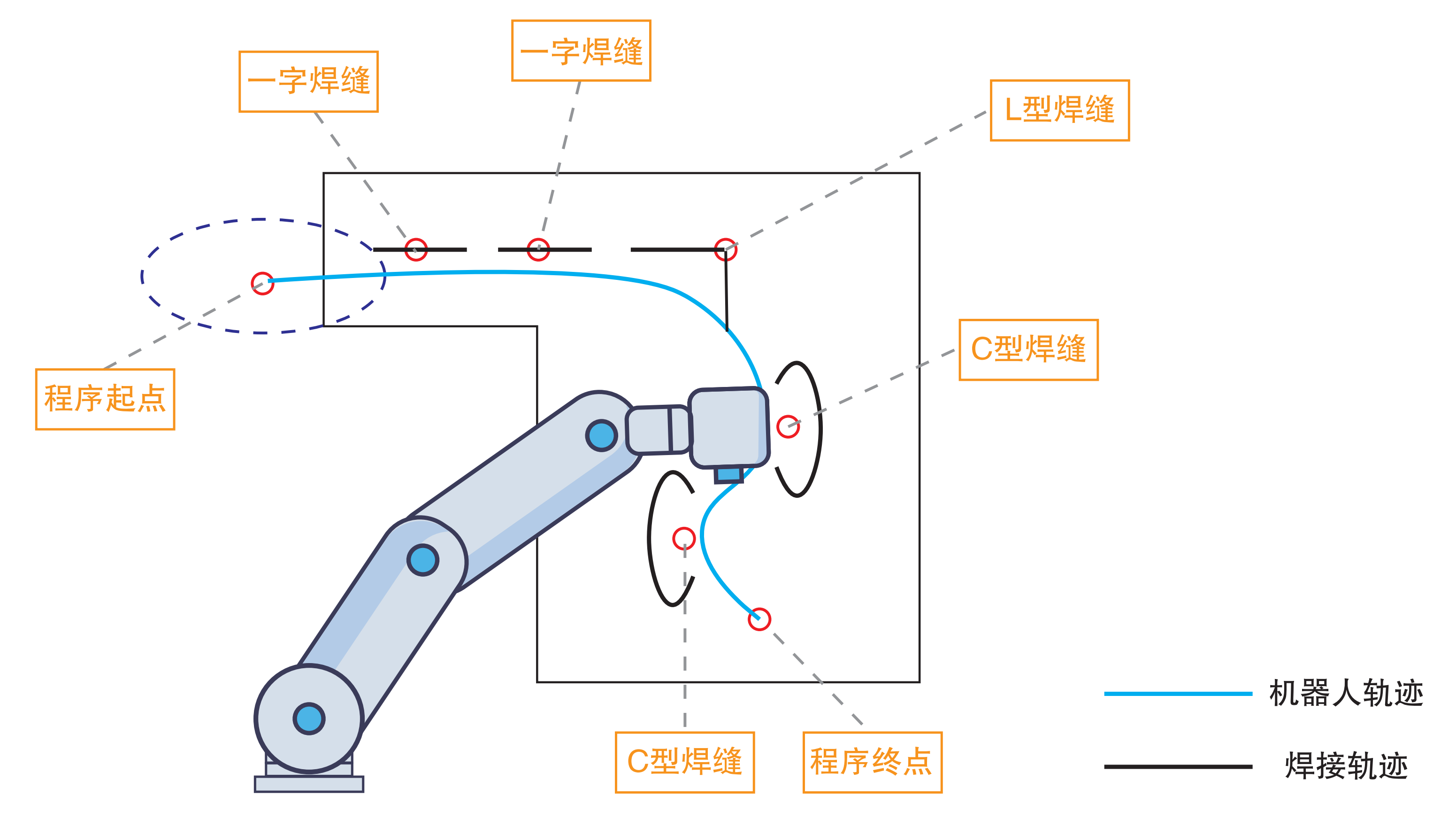
支持机器人多段、任意方向、任意速度进行加工。
控制器硬件底层实现机器人与振镜高精度时间同步。
精确地时序分析与位置分析,为加工提供指导。
自主知识产权的软件系统
支持飞行焊接与静态加工,一套系统即可适应多种加工环境。
全局偏移,接收视觉反馈的偏差值进行飞行加工,使系统更具柔性。
自定义MES,支持上传生产数据至用户系统中。
使用安全
支持程序锁及权限管理功能,防止意外修改。
具有丰富的安全信号、严格的调用流程控制、多种异常处理方式,保证系统安全运行。
具有全面的状态监控,振镜状态、系统状态实时监测,全过程控制,所有运行历史可查询。
功能丰富
3D工作空间可视化,便于调整焊缝位置及仿真预览。
支持Modbus/Tcpip/Profinet等常用总线。
支持速度、功率随位置变化,支持Wobble等工艺。
系统应用
汽车行业-四门两盖焊接
在汽车制造领域,激光焊接技术已被广泛的应用,但在车门箱盖等零部件焊接中,焊缝短、数量多,同时焊接节拍要求高的痛点仍然存在。
金橙子推出的飞行焊接系统,融合机器人控制及焊接振镜的联动控制,机器人的运动与激光振镜的扫描焊接同步进行,可以很大限度地消除每段焊接前不断重复定位造成的非生产性时间的浪费,使得激光束在线时间最大化,提高了生产效率。自定义焊缝形式优化了焊缝强度,增加设计的灵活性,更窄的法兰边需求有利于车身轻量化。系统可用于不同的任务和工件,节约总成本。

新能源行业-极柱和汇流排焊接
电池模组是由多个单体电芯串并联组装而成,将汇流排与极柱焊接在一起,实现电芯的串并联,需要连接片与电池的极柱接触电阻小,抗振动、牢靠程度高。
目前生产中存在待焊区域较多、节拍较快,普通激光焊接难以满足工艺要求:待焊接产品类型多,需要兼容多代产品等问题。
金橙子推出的飞行焊接系统针对以上痛点,实现机器人与机器人同步,飞行焊接过程中无停止,消除非有效焊接时间,提升生产效率,同时应用机器人增加了使用柔性,可以适应多种尺寸模组的加工。


联系我们

全国统一服务热线

微信公众号

抖音企业号

服务支持
北京金橙子科技股份有限公司
地址:北京市顺义区北务镇民泰路13号院22号楼
地址:江苏省苏州市虎丘区科技城漓江路56号3楼
广东金橙子科技有限公司
地址:广东省东莞市寮步镇仁居路1号松湖智谷研发中心A4栋1002室
北京金橙子科技股份有限公司武汉分公司
地址:湖北省武汉市东湖高新区大学园路华工科技园现代服务业基地1号楼B座1101

版权所有 © 2022 北京金橙子科技股份有限公司 京ICP备18045191号-1